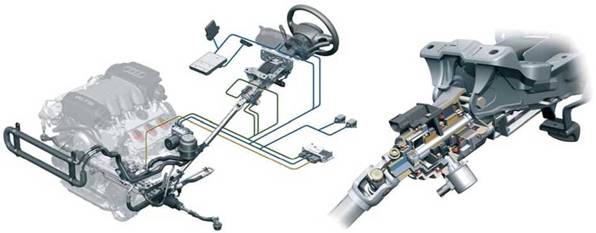
Система динамического рулевого управления служит для изменения передаточного отношения рулевого механизма в зависимости от скорости движения автомобиля и угла поворота рулевого колеса. Кроме того, динамическое управление вместе с системой курсовой устойчивости участвует в стабилизации автомобиля путем подруливания управляемых колес.
По своей сути, система аналогична системе активного рулевого управления. Основное отличие заключается в использовании для изменения передаточного отношения вместо планетарного редуктора волновой передачи. Система динамического рулевого управления устанавливается на автомобили Audi. Но первенство в применении волновой передачи для изменения передаточного отношения рулевого механизма принадлежит компании Toyota. Ее система Variable Gear Ratio Steering (VGRS) устанавливается с 1998 года.
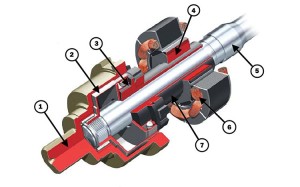
Основным конструктивным элементом системы динамического управления является суммирующий механизм, который изменяет угол поворота управляемых колес. Угол поворота может увеличиваться (подруливание в направлении поворота) или уменьшаться (подруливание в противоположном направлении). Кроме того, для поддержания курсовой устойчивости автомобиля, суммирующий механизм может поворачивать колеса без участия водителя.
Суммирующий механизм смонтирован на рулевом валу. Верхняя часть рулевого вала через шлицы соединена с гибкой шестерней, снабженной наружным зубчатым венцом из ста зубьев. Шестерня имеет овальную форму и поэтому только в двух местах соединяется с внутренним венцом зубчатой муфтой, у которой на два зуба больше. Зубчатая муфта жестко соединена с нижней частью рулевого вала.
Если система динамического рулевого управления не активирована, вращение от рулевого колеса передается через верхнюю часть рулевого вала, гибкую шестерню, зубчатую муфту, нижнюю часть рулевого вала и далее на рулевой механизм без изменения передаточного отношения.
На верхнюю часть рулевого вала надет полый вал. На одном конце вала размещен синхронный электродвигатель постоянного тока. На другом конце посажен шариковый подшипник. Внутреннее кольцо подшипника имеет овальную форму. Наружное кольцо подшипника выполнено в виде гибкой стальной обоймы. В сборе овальный подшипник образует генератор волн. На наружное кольцо подшипника посажена гибкая шестерня.
При активации системы динамического управления на электродвигатель подается электрический ток. Вращение от двигателя передается на овальный подшипник, гибкую шестерню и далее на зубчатую муфту. За счет эксцентричности волновой передачи каждый полный оборот подшипника приводит к повороту зубчатой муфты на 3,5 градуса. В зависимости от направления вращения достигается положительный или отрицательный суммирующий эффект рулевого управления Другими словами, для поворота управляемых колес на определенный угол рулевое колесо можно будет повернуть на больший или меньший угол.
Управление электродвигателем суммирующего механизма осуществляет электронный блок управления. Для изменения передаточного отношения рулевого механизма блок рассчитывает необходимый угол подруливания. Кроме того, блок управления определяет корректирующие параметры угла поворота управляемых колес для поддержания курсовой устойчивости автомобиля на заданном водителем курсе.
Основными параметрами для расчета управляющего воздействия являются скорость движения автомобиля (определяет датчик частоты вращения колеса) и заданный водителем угол поворота рулевого колеса (определяет датчик угла поворота рулевого колеса). Кроме этого блок управления в своей работе использует сигналы от датчика положения вала электродвигателя, датчика нулевого положения рулевого механизма, датчиков системы курсовой устойчивости